There is a considerable growth in the amount of data being generated by cameras particularly in the fields of quality inspection systems, public security and monitoring. With the increasing number of cameras, frame rates and resolutions even powerful back-end video processing systems are quickly reaching their limits. The approach to overcome this is to use a distributed computing platform, equipped with intelligent frame-grabbers which not only deliver a pre-filtering of the camera data but also make local decisions based on the input. This significantly reduces the data traffic to the backend system and fulfills deterministic real-time requirements.
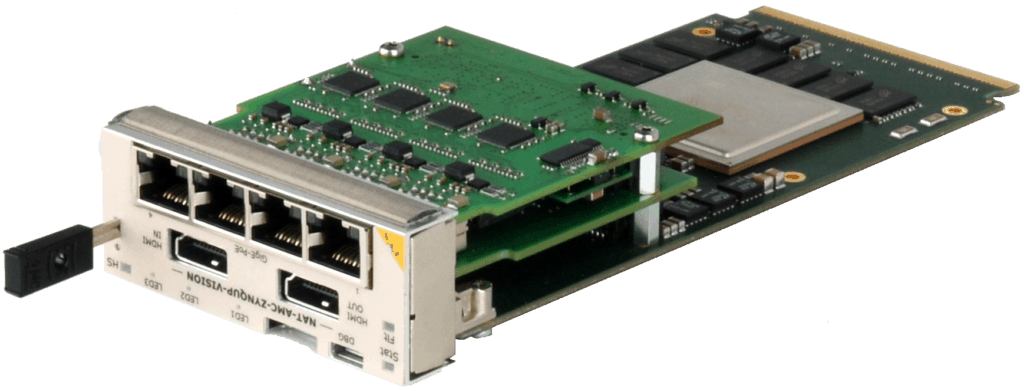
Edge devices for vision processing and frame-grabbing can be composed of general and special purpose processors, FPGAs or any combination thereof. FPGAs offer advantages in pipelining and parallelism, which can be applied to most image processing operations. A general purpose CPU should be used for simple image processing tasks that require the use of software libraries. It is also useful for local system administration and setup. An architecture comprising of CPU and FPGA therefore offers a good balance in terms of flexibility cost and processing performance. The figure shows the dataflow of a frame grabber based on GigE-Vision.